ELSI Toolkit (coming shortly)
Luke Moffat, Joe Deville, Corinne May-Chahal
2024
The link to the website hosting the demo: ELSI Toolkit.
You can read the Case Study following the link: Case Study 2: Bringing ELSI Principles and Creative Methods to National Highways.
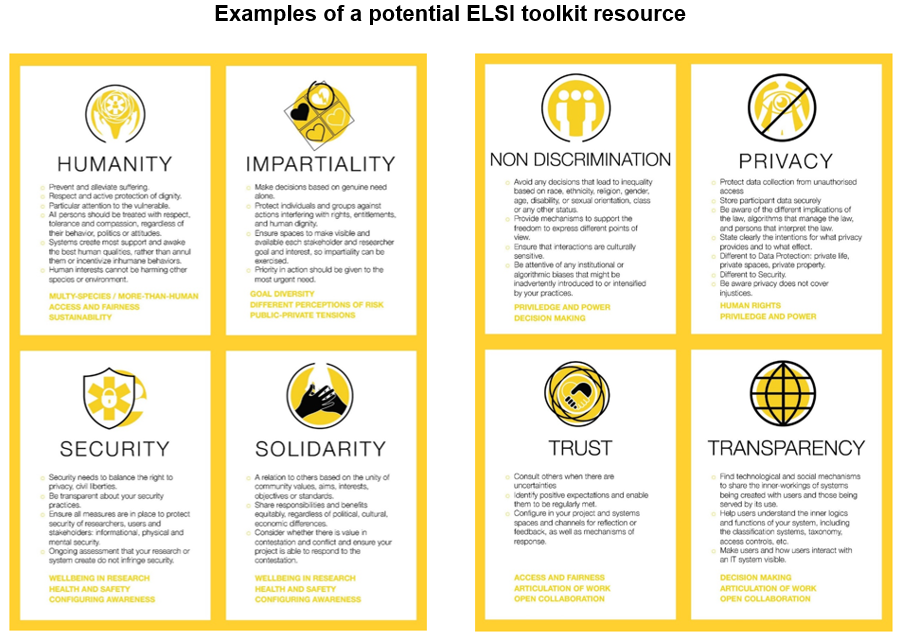
A co-created physical & digital resource for organisations to conduct ethical impact self-assessment for the design and/or adoption of new autonomous technologies. This toolkit is designed for independent facilitation of workshop and reflective activities, which allow organisations working with autonomous technologies to critically assess the ethical and security impacts of their work. This will help create space for complex conversations about wider effects of autonomous technologies of organisations and society, including users, publics, and environments. The toolkit aims to provide simple and accessible resources for organisations to use to host 1 – 3 internal workshops with staff around relevant themes. Each workshop includes a facilitation guide, supported by resources.
Encoding Social Values in Autonomous Navigation: An Interactive Online Demonstration 2024
Yun Tang, Luke Moffat, Weisi Guo, Corinne May-Chahal, Joe Deville, Antonios Tsourdos
You can read the Case Study following the link: Case Study 1: Securing Drone Communications Against New Electromagnetic Meta-Surfaces and Inferring their Trustworthiness in Wider Air Spaces.
The link to the website hosting the demo: Encoding Social Values in Autonomous Navigation: An Interactive Online Demonstration.
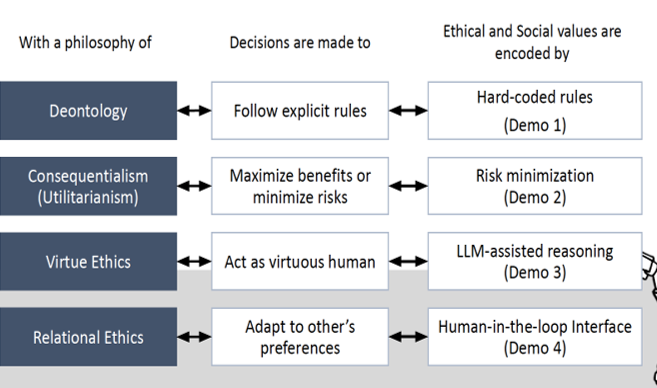
This website contains five demos, Baseline Scenario, Encoding Overview, Demo 1, Demo 2, Demo 3, and Demo 4, presenting how autonomous system developers encode ELSI (ethical, legal and social impact) principles into the decision-making process of autonomous systems.
The methodologies demonstrated on the website are the main contributions of our conference publication in The Second Trustworthy Autonomous System Symposium 2024 in Austin, Texas, US. The publication title is: “Encoding Social & Ethical Values in Autonomous Navigation: Philosophies Behind and an Interactive Online Demonstration
Road Traffic Safety (RTS) – Guidance on Ethical Considerations Relating to Safety for Autonomous Vehicles: ISO 39003:2023
Lisa Dorn
You can read the Case Study following the link: Case Study 3: Road Traffic Safety (RTS) – Guidance on Ethical Considerations Relating to Safety for Autonomous Vehicles: ISO 39003:2023.
The link to the website: Road traffic safety (RTS). Guidance on ethical considerations relating to safety for autonomous vehicles